Links and Controls
Connecting Everything Together
Links and Controls provide a mechanism for connecting model inputs or any value to other components such as moving surfaces.
They can be added from pre-defined components, ranging from simple ratios to dynamic response and basic FCS components.
By adding these and connecting them together, control systems and interconnections may be added without any code being written.

Multiple Link Items can be connected together from the available list
Gearing
Mechanical Linkages and Scaling
 Gearing can be a simple constant value up to a 3D Table. The Gearing can represent the gearing ratio between Pilot controls and Surface Deflections.
Gearing can be a simple constant value up to a 3D Table. The Gearing can represent the gearing ratio between Pilot controls and Surface Deflections.
These can be used to mix or split components e.g. Positive Roll Stick Produces Trailing Edge Down (positive) Left Aileron deflection and Trailing Edge Up (negative) Right Aileron Deflection.
The Gearing can also scale the deflections differently for trailing edge down and trailing edge up.
Actuators
1st and 2nd Order Dynamic Response
Actuators provide a dynamic response to the input. Actuators can provide a first or second order response. The user can change gains and responsiveness through the GUI and re-run an analysis without the need to re-compile a model.
- 1st Order Actuator

A 1st Order Actuator’s dynamic response is described by a first order differential equation.
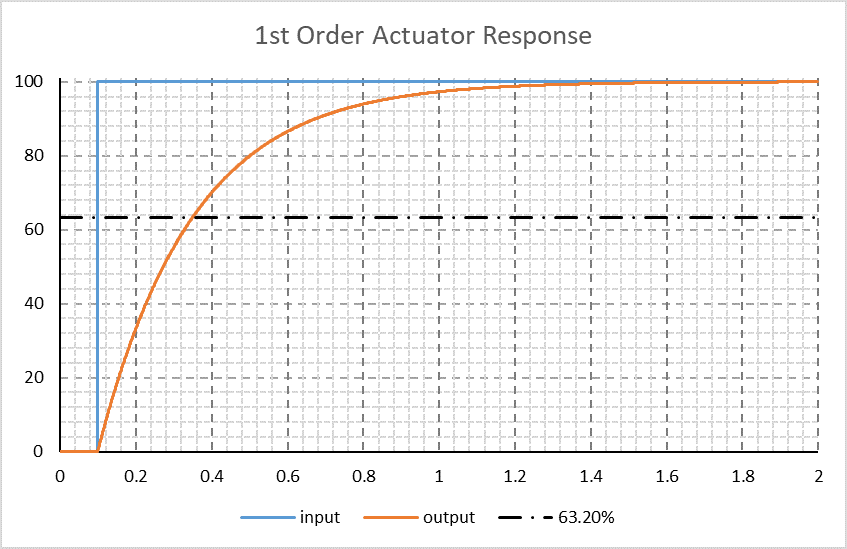 This produces a first order lag.
This produces a first order lag.
- 2nd Order Actuator

The response of a 2nd Order Actuator depends upon whether it is an overdamped, critically damped, or underdamped second order system.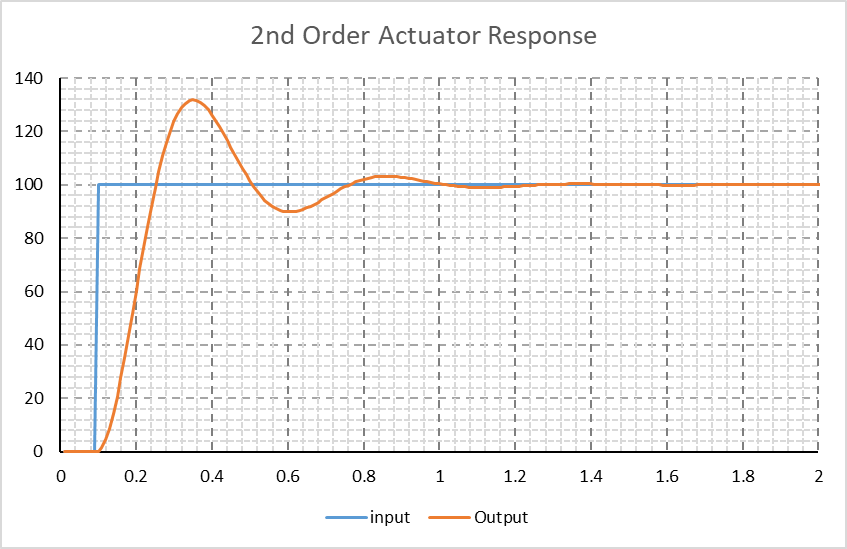
Washout Filter
Dynamic Response to Movement
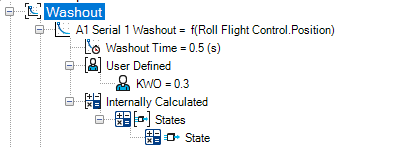 The Washout Filter provides output responses based upon the rate of change of a parameter. The faster the input moves, the larger the output from the washout filter. When the input is constant, the output washes out to 0.
The Washout Filter provides output responses based upon the rate of change of a parameter. The faster the input moves, the larger the output from the washout filter. When the input is constant, the output washes out to 0.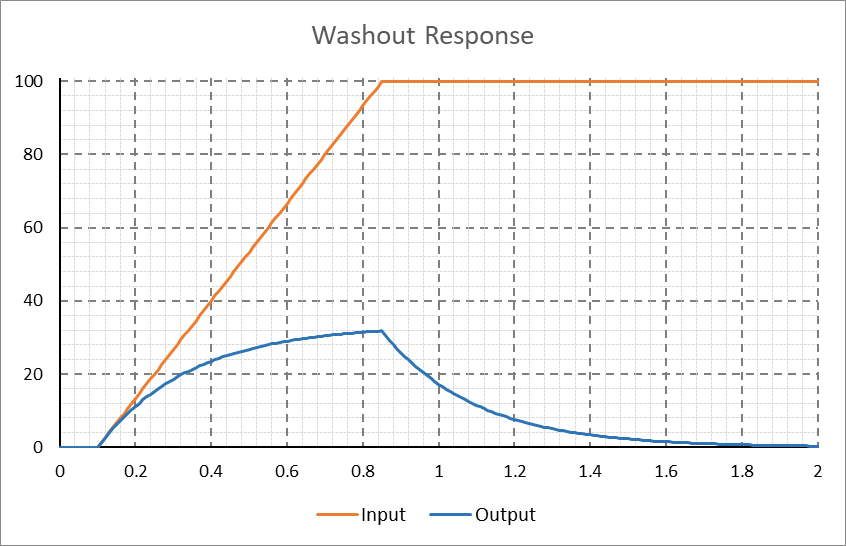
PID
Classic Feedback Controller
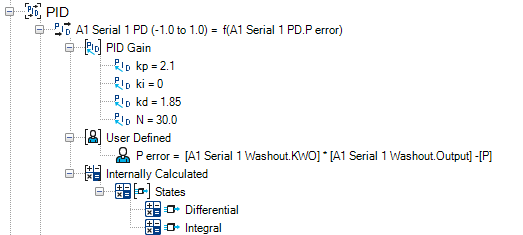 Proportional-Integral-Differential controllers can be inserted into the system where necessary to provide FCS functionality.
Proportional-Integral-Differential controllers can be inserted into the system where necessary to provide FCS functionality.
The gains on the system can be constants or scheduled via tables up to 3D.
Rate Limiter
Maximise/Minimise Rate of Change
 The Rate Limiter will pass through the input value given to it until the rate of change of the input value meets or exceeds the user-defined limit. At this point the output is limited to the previous value plus the maximum change allowed in a time step.
The Rate Limiter will pass through the input value given to it until the rate of change of the input value meets or exceeds the user-defined limit. At this point the output is limited to the previous value plus the maximum change allowed in a time step.
Connecting Everything Together
Creating a Daisy Chain of Link Items
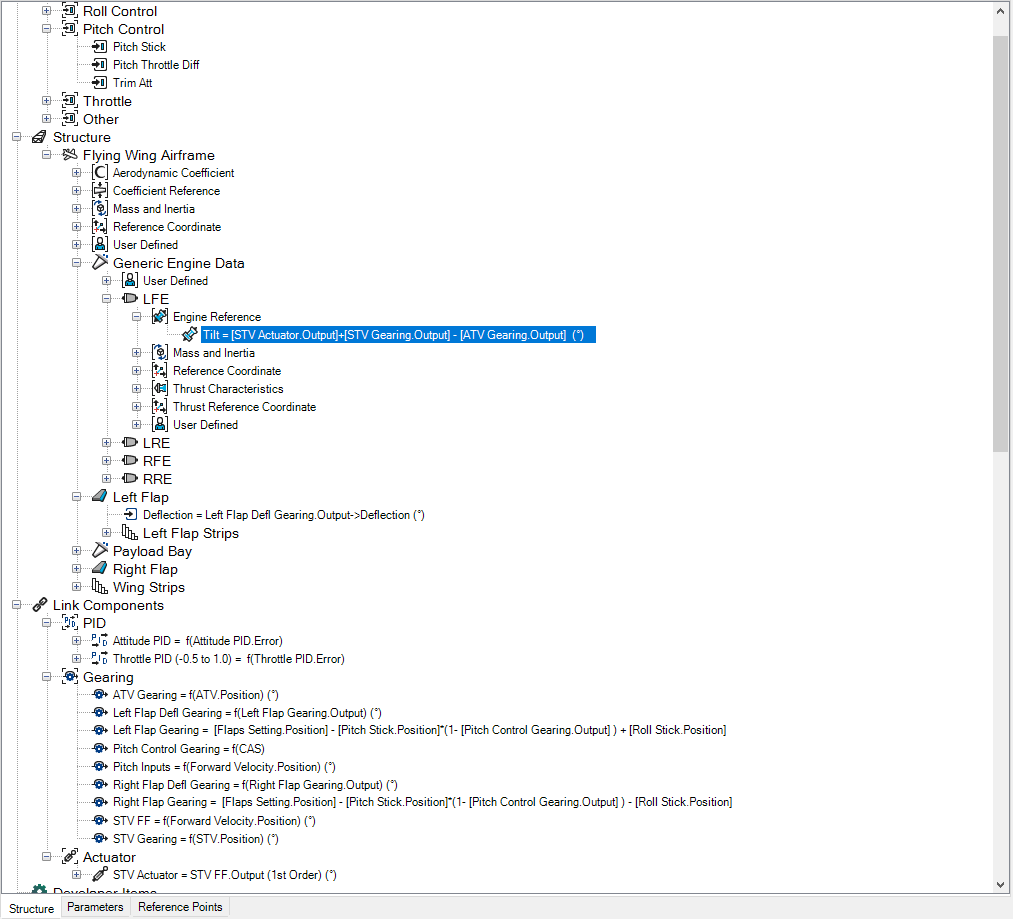 Link items can be connected together by taking the output from one and defining it as the input to the next. In this way, pilot inputs can be scaled, added to a controller input and then used to drive an actuator that moves a control surface.
Link items can be connected together by taking the output from one and defining it as the input to the next. In this way, pilot inputs can be scaled, added to a controller input and then used to drive an actuator that moves a control surface.
For further information on what j2 Builder can offer, see: