j2 Rotary
High Fidelity Rotary Models
The j2 Universal Tool-Kit provides high fidelity rotary modelling capability through the j2 Rotary plug-in. This accurately delivers autorotation, expected ground effect efficiencies, and realistic translational lift ‘right out of the box’.
For the j2 Rotary plug-in, j2 Aircraft Dynamics has teamed up with Presagis to provide a significant advance in high fidelity rotary modelling. The use of the Blade Element Rotary Model (BERM), from HeliSIM, integrated into the j2 Universal Tool-Kit’s flight dynamics and modelling environment provides a unique and rapid rotary prototyping capability.
This means the model is able to simulate the complete operational envelope of the helicopter including stability in hover and tail rotor failures. Additional effects are accurately modelled including downwash and downwash ingestion, Upwash, engine and gearbox failures.
The impact of system failures and atmospheric disturbances on the helicopters behaviour, including loss of tail-rotor effectiveness (LTE), are inherent in the handling and responsiveness of the model.

Adding Rotors onto a Model
 With the j2 Rotary Plug-In, it is possible toadd a Rotor Assembly Item into an Aircraft Model being developed in j2 Builder. With the Rotor Assembly Item the user selects a HeliSIM rotor model. This defines the Main Rotor, Tail Rotor and Gearbox characteristics.
With the j2 Rotary Plug-In, it is possible toadd a Rotor Assembly Item into an Aircraft Model being developed in j2 Builder. With the Rotor Assembly Item the user selects a HeliSIM rotor model. This defines the Main Rotor, Tail Rotor and Gearbox characteristics.
 The Rotor Assembly is then populated to include the Rotor Control Parameters, Drive Shafts to drive the Gearbox, and Failure Switches.
The Rotor Assembly is then populated to include the Rotor Control Parameters, Drive Shafts to drive the Gearbox, and Failure Switches.
Once completed, the forces and moments output from the rotors and the gearbox are applied to the airframe at their respective locations.
The contributions from the rotors can be tuned and adjusted independently to the airframe aerodynamics with the corrections also applied at the respective locations.
Adding Additional Features
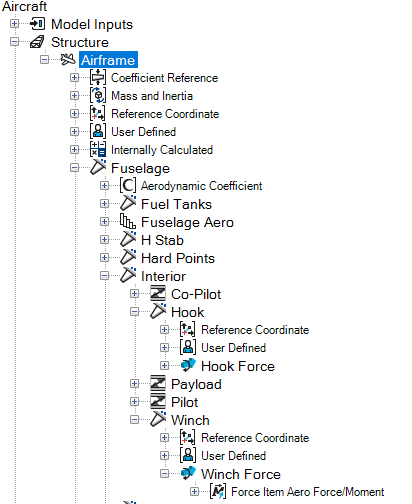
Through the j2 Builder Graphical Interface users can add the airframe aerodynamics and additional features such as dynamic payloads, winch operations and external equipment packages. These can include aerodynamic effects, locations, and weights and balance information. All contributions are summated to a total set of values for the helicopter, automatically including orientation and moment arms. This significantly simplifies the model build process.
The integrated dynamic modelling engine enables the user to “fly” the helicopter offline or in real-time simulation through any pilot inputs and environmental conditions. The offline ability significantly reduces the time to develop and test the model, enabling structured and repeatable test to be performed during the development process without requiring extensive simulator time.