eVTOL Design
Creating Digital Twins for Design and Certification
 eVTOL aircraft cover a range of uses from Personal Air Vehicles(PAV) through Urban Air Mobility (UAM) platforms and they are all much more than scaled up drone designs. They all still require to be designed and analysed just as you would with any conventional aircraft, manned or unmanned. This is achieved using high fidelity modelling, analysis and simulation tools and assures that robust assessment of core stability and control, handling qualities and flight safety assurance in failure modes are all closely studied. These tasks can all be achieved through using a single set of tools, the j2 Universal Tool-Kit. Whether it's a multi-rotor, vectored thrust, or lift-cruise configuration, every design of an eVTOL platform has to go through the process of transitions from vertical take off, transition to forward flight and back again to hover smoothly and safely. This can be tested, evaluated and modified throughout the design process by using the j2 Universal Tool-Kit. From transition to performance analysis, to the modelling of gusts and cross winds on stability and control during transitions or across the entire flight regime even down to the development and evaluation of flight control systems, everything is possible. The complete certification process can be evaluated offline using j2 Universal Tool-Kit and cross referenced with real flight test data from full scale aircraft to ensure a safe air vehicle and a successful aircraft certification.
eVTOL aircraft cover a range of uses from Personal Air Vehicles(PAV) through Urban Air Mobility (UAM) platforms and they are all much more than scaled up drone designs. They all still require to be designed and analysed just as you would with any conventional aircraft, manned or unmanned. This is achieved using high fidelity modelling, analysis and simulation tools and assures that robust assessment of core stability and control, handling qualities and flight safety assurance in failure modes are all closely studied. These tasks can all be achieved through using a single set of tools, the j2 Universal Tool-Kit. Whether it's a multi-rotor, vectored thrust, or lift-cruise configuration, every design of an eVTOL platform has to go through the process of transitions from vertical take off, transition to forward flight and back again to hover smoothly and safely. This can be tested, evaluated and modified throughout the design process by using the j2 Universal Tool-Kit. From transition to performance analysis, to the modelling of gusts and cross winds on stability and control during transitions or across the entire flight regime even down to the development and evaluation of flight control systems, everything is possible. The complete certification process can be evaluated offline using j2 Universal Tool-Kit and cross referenced with real flight test data from full scale aircraft to ensure a safe air vehicle and a successful aircraft certification.
High Fidelity Modelling
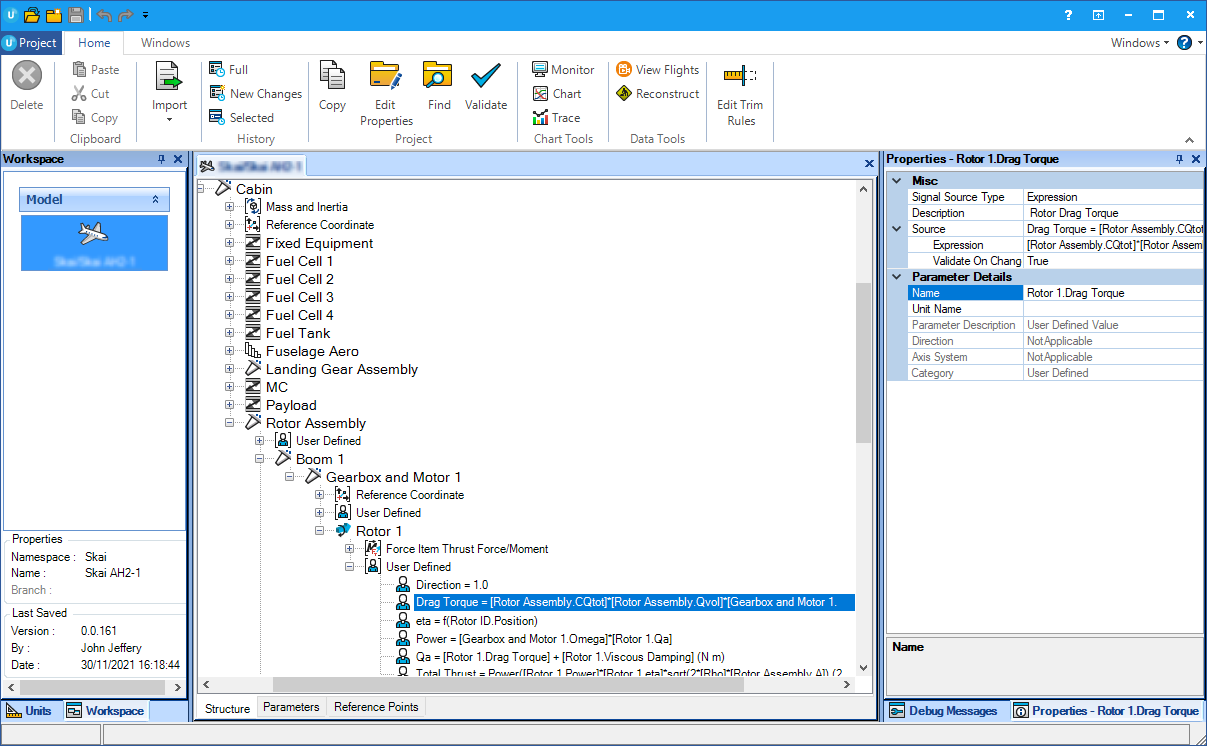 Each type of eVTOL has many unique characteristics. To be able to build a model suitable for performing true stability and control analysis and handling qualities assessments across the complete flight envelope takes more than shaping a few curves and flying the eVTOL in a gaming tool. With j2 Builder, the model is presented as a complete breakdown of all the aircrafts contributing parts located in the correct position and assembled in a logical hierarchy mimicking the aircrafts configuration. Aerodynamic data can be added from any source, even using the integrated aerodynamic strip theory in j2 Elements where there is none or limited data to provide dynamic characteristics from limited airfoil section data through to the inclusion of higher fidelity wind tunnel or CFD data. Multi rotor downwash contributions can be added and focussed on the individual strips without needing to update the aircraft coefficient information. Fuel cells and batteries can be located about the airframe to provide Centre of Gravity and inertia investigations as well as varying payload configurations with the modelling environment easily accommodating the analytical challenges of scaling up in size.
Each type of eVTOL has many unique characteristics. To be able to build a model suitable for performing true stability and control analysis and handling qualities assessments across the complete flight envelope takes more than shaping a few curves and flying the eVTOL in a gaming tool. With j2 Builder, the model is presented as a complete breakdown of all the aircrafts contributing parts located in the correct position and assembled in a logical hierarchy mimicking the aircrafts configuration. Aerodynamic data can be added from any source, even using the integrated aerodynamic strip theory in j2 Elements where there is none or limited data to provide dynamic characteristics from limited airfoil section data through to the inclusion of higher fidelity wind tunnel or CFD data. Multi rotor downwash contributions can be added and focussed on the individual strips without needing to update the aircraft coefficient information. Fuel cells and batteries can be located about the airframe to provide Centre of Gravity and inertia investigations as well as varying payload configurations with the modelling environment easily accommodating the analytical challenges of scaling up in size.
Any number of engines can be adjusted in tilt and toe, throughout the flight, to cover tilt rotor, thrust vectoring or lift cruise configurations or multiple force items can be added to provide multi-rotor configurations. Rotor and system dynamics can be introduced from simple look-up tables through to interlinked tables and equations to provide detailed simulations of the loading characteristics and interactions. The model is constructed using the graphical user interface(GUI) of j2 Builder so items are easy to find and cross reference.
 Steady State and Dynamic Response Modelling
Steady State and Dynamic Response Modelling
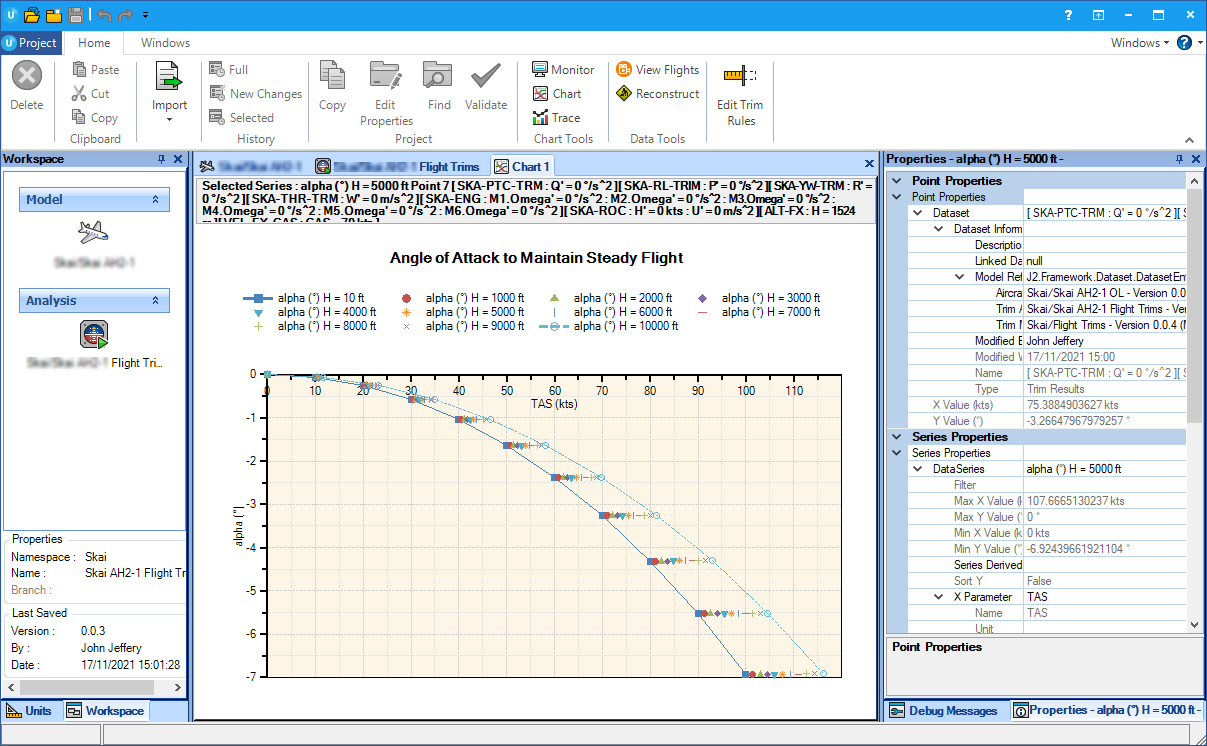
Understanding the aircraft’s behaviour requires many tests and the examination of test points throughout the aircraft’s envelope. As the aircraft moves towards certification, so these tests can number 1000’s. The tests need to be consistent and repeatable so that they can be re-evaluated as the design evolves. This approach is not feasible in a real-time simulation. This process of off-line simulation (Dynamic/Static Response Analysis) involves the production of various fixed manoeuvres that will demonstrate the behaviour of the aircraft to different pilot inputs and calculates the responses over ranges of flight conditions, configurations and payloads. This is all possible through the use of j2 Freedom. Cross plots and comparison charts used when assessing airframe safety limits can also be produced automatically from user defined templates with j2 Visualize.

Handling Qualities Assessment
As the design evolves so the aircraft will need to be assessed against the requirements for certification through referencing various standards. Whether this is identifying natural and augmented stability or FCS design through the use of root locus charts or cross checking the modes of motion against the existing or new standards, this can all be achieved with the linear analysis capability available in j2 Classical. Modes of motion are identified along with their respective frequency and damping characteristics across the whole flight envelope. State space matrices can be found to support the evolution and evaluation of flight control system (FCS) design.
Flight Control System Design
One of the key aspects of eVTOL development is to recognise that the rotor dynamics do not scale up from a drone to a full scale aircraft easily. So, when considering FCS design, control systems that work with a drone may not be suitable to control a larger eVTOL air vehicle, manned or unmanned. High fidelity models built within the j2 Universal Tool-Kit can have Flight Control components added to them directly using j2 Builder. Alternatively, the complete aircraft model can be added to a Simulink diagram for the AFCS, developed in Matlab, to be wrapped around it. This complete Closed Loop system can then be evaluated back into the j2 Universal Tool-Kit using the j2 Matlab Toolbox.
j2 have a successful track record in supporting a number of UAS developments in evaluating the FCS systems capability to control the aircraft especially at lower air speeds in take-off and landing configurations and the overall evaluation of the impact of gusts and cross winds on the controls logic and overall capability to deliver a safe and stable aircraft.
 Simulation
Simulation
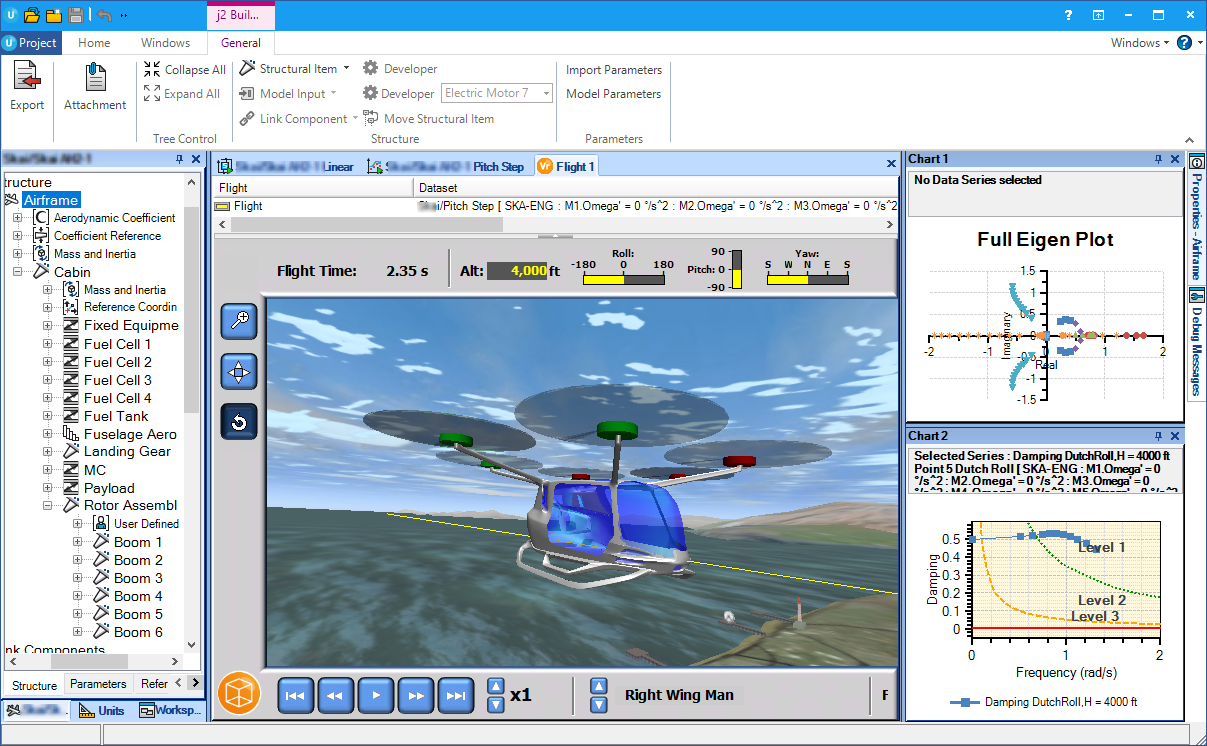
Offline and Realtime Simulation is available with the j2 Universal Tool-Kit through using either j2 Freedom or j2 Pilot respectively. The j2 Universal Tool-Kit provides a consistent version controlled high fidelity model that can be used across both these modules simultaneously. As the model evolves into a higher fidelity Digital Twin to include electrical, thermal and hydraulic systems, along with onboard avionics, so the offline tests can be re-run and the pilot can evaluate the aircraft without any code needing to be written.
Failure Mode Analysis
With less-conventional aircraft designs, the response of the aircraft to failures is less well known or predictable and is therefore significantly more difficult to evaluate. With a Digital Twin model created in the j2 Universal Tool-Kit it is possible to evaluate any range of failure scenarios from single/multiple engine failures, power system failures, thermal failures, rotor failures to system interrupts and interference. Each of these areas can be evaluated against desired responses and safety criteria to ensure that the required safety standards can be met.